

 QQ
QQ
“双机协调系统是指, 2 台机器人协同对1个工装轴进行作业的系统。”

双机协调功能是在《选项功能之《工装轴协调功能》》的基础上增加的功能,可以同时使用两个协调程序,也即是能够同时使用两台机器人和工装轴进行协调作业。
• 一方机器人和工装轴的协调程序(R1 + S1)
• 另一方机器人和工装轴的协调程序(R2 + S1)
如需使用本功能,请开通【独立控制】【双机协调】【轴组扩展】功能,本功能不需要额外增加硬件。
01
—
程序配置
利用独立控制功能配置程序(使用方法请参考文章《选项功能之《独立控制功能》之一》《选项功能之《独立控制功能》之二》),通过主任务的并行程序或无控制轴组的机器人程序来启动子任务1/2 的机器人程序。
主任务:并行程序(无控制轴组的机器人程序)
启动子任务1/2、进行I/O 控制。
子任务1:机器人程序
一方的机器人+工装轴的协调程序。
子任务2:机器人程序
另一方的机器人+工装轴的协调程序。
PS:请务必在子任务1/2 中设置1 个从侧,子任务1/2 通过PSTART 命令的标签SYNC 来确定主侧/从侧。要设置从侧,请向主任务中的PSTART 命令后附加标签【SYNC】和主侧的子任务名称。附加了SYNC 的子任务为从侧、未附加SYNC 的子任务为主侧。工装轴由主侧程序控制,从侧程序随工装轴动作。
例:
NOP
0001 PSTART JOB:程序-1 SUB1 SYNC SUB2
0002 PSTART JOB:程序-2 SUB2
上述的整个程序为主任务的程序
程序-1为子任务1 从侧
程序-2为子任务2 主侧
此时,子任务1的机器人与主侧子任务2同步。
02
—
程序说明
下图为双机协调程序的一个案例:
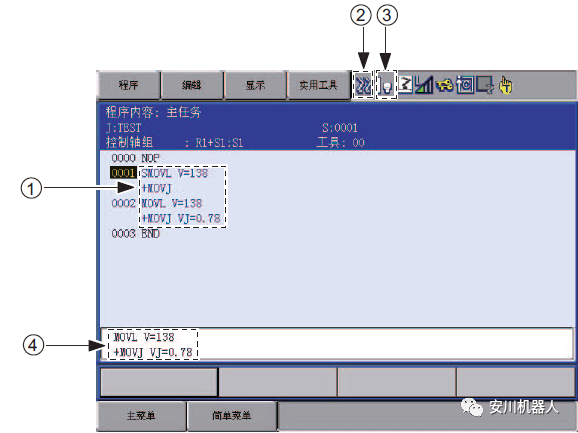
① 命令
协调程序中移动命令显示为 2 行(上方为从侧,下方为主侧)。
SMOVL V= 138 ←从侧 机器人
+MOVJ ←主侧 工装轴
② 连动/单独
图片
选择协调程序示教时机器人的动作方式。按一次该按键切换一次。
连动:状态显示区显示“ 连动”。此状态下启动主侧,从侧也会跟着启动。
单独:仅轴操作对象的机器人动作。
图片
连动
以“ 连动” 方式进行轴操作时,主侧(工装轴)动作时,从侧(机器人)也跟着动作。在需要保持工装轴与机器人的相对位置时使用。但是,启动从侧并不能使主侧动作。
图片
轴操作动作对象为主侧外部轴时,从侧机器人也跟着动作
图片
轴操作动作对象为从侧机器人时,主侧外部轴不跟随动作
单独
以“ 单独” 方式进行轴操作时,仅轴操作对象轴组动作。
在机器人与工装轴相互进行其他作业的程序点使用。
图片
轴操作动作对象为主侧外部轴时,从侧机器人不跟随动作
图片
轴操作动作对象为从侧机器人时,主侧外部轴不跟随动作
③ 操作对象轴组
显示轴操作对象的轴组。
按下[ 机器人切换],即切换为机器人。
按下[ 外部轴切换],即切换为工装轴。
④ 协调插补/个别插补
按[ 协调] 键,可进行协调插补/个别插补的切换。选择协调程序示教时采用协调插补还是个别插补。按一次该按键切换一次。
图片
协调:此时登录的移动命令为协调命令。
个别:解除主-从关系, 2 台机器分别执行个别插补动作。
03
—
协调动作同步
执行程序的过程中, 2 台机器人的动作会出现偏差。在想要使2 台机器人动作一致的程序点,可在此前执行TSYNC 命令以实现同步。若任意一方的1 个机器人程序执行了TSYNC,另一方的机器人程序也会等待执行相同的同步信号TSYNC。通过同步数设定要同步的任务个数。将同步数设定为“ 未使用” 时,任务数与同步数2 相同。
同步命令YSYNC设置步骤:
1. 将光标移至登录TSYNC 命令处的前一行。
2. 按[命令一览]
– 显示命令一览对话框。
图片
3. 选择TSYNC 命令
– 输入缓冲行显示TSYNC 命令。
图片
4. 变更数值数据
– 按[追加]+[回车]直接登录输入缓冲行的命令,然后修改同步数。
(1) 将光标移至数值数据。
(2) 同时按下[ 转换] 和光标键,可增加或减少数据。
(3) 使用数字键输入时,按下[ 选择] 键,即显示输入行。
(4) 输入数值后按[ 回车] 键,输入缓冲行的数值即被改变。
(5) 数值数据变更完成后,按[ 回车] 键。
